
Counter-UAS Drones
Designed, built, and supported multiple small UAS platforms for counter-UAS autonomy development and flight testing.
A complete collection of my engineering, aerospace, robotics, and software projects.
Designed, built, and supported multiple small UAS platforms for counter-UAS autonomy development and flight testing.

Helped design, manufacture, integrate, and launch Snowbird, BYU Rocketry's 30,000 ft COTS rocket for IREC 2026.
Developed LiDAR-based control barrier functions for safe autonomous navigation around static and dynamic obstacles in ROS 2 simulation.
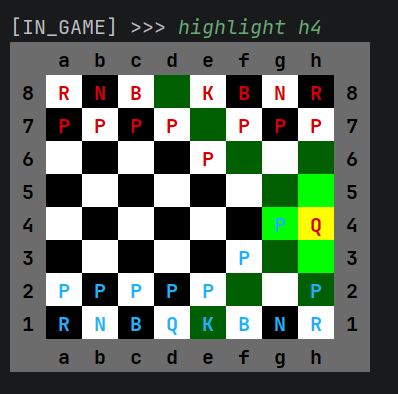
Built a networked chess application in Java with persistence, security, web services, and realtime multiplayer interaction.

Modeled the impact and rebound of a water balloon and a water droplet using high-speed video data and a two-state dynamic system.

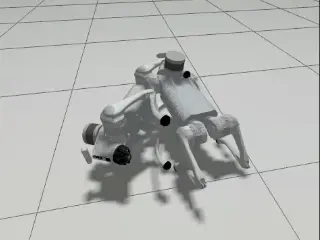
Built and flew an X650 quadrotor indoors with motion-capture feedback, then validated autonomous trajectories through a ROS 2 / PX4 / Gazebo simulation workflow.
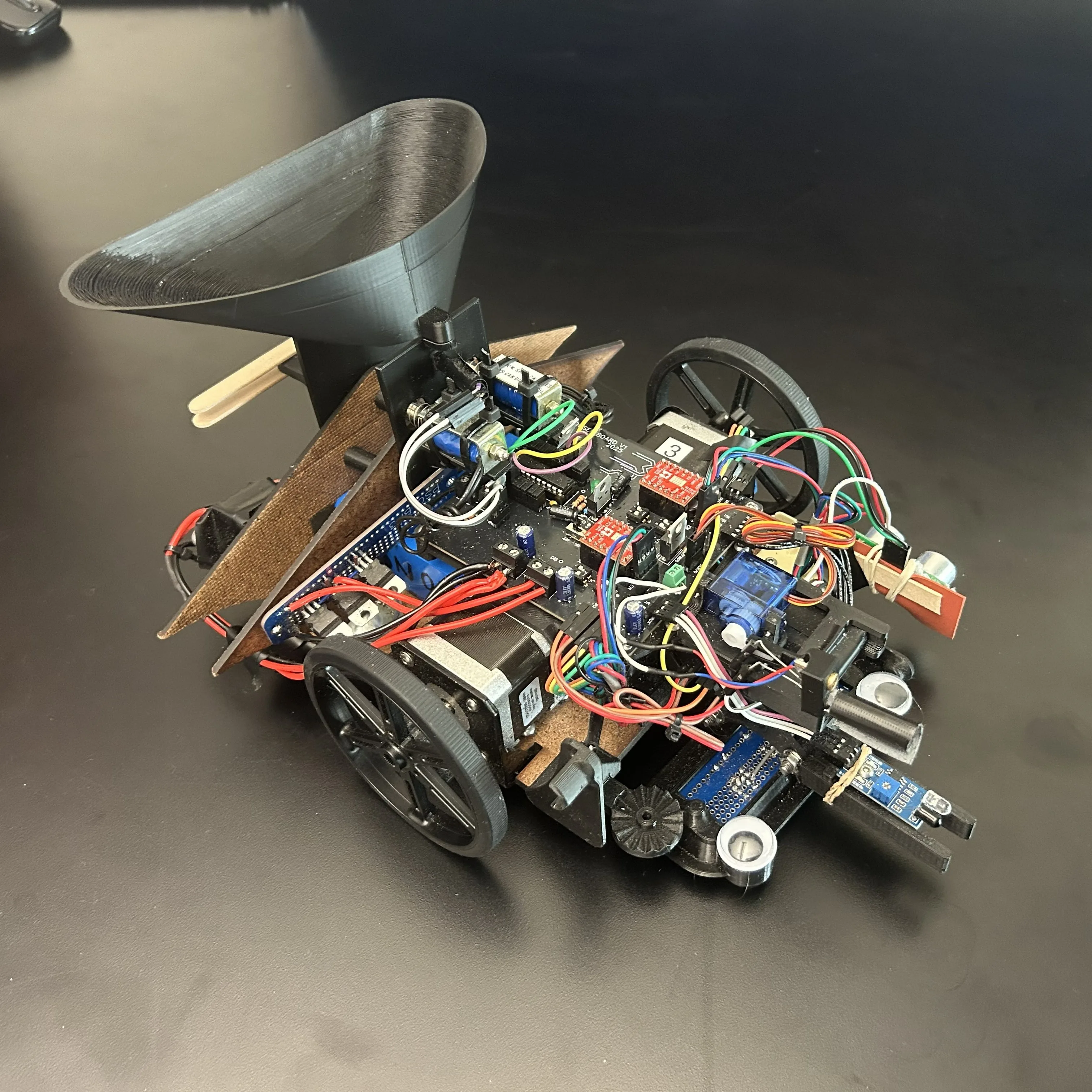
Designed and built a microcontroller-driven Mars rover for a four-person mechatronics mission project with autonomous navigation and task execution.
Designed a 3D-printed quadrotor platform for multi-agent robotics research with ROS 2 simulation and AI-agent control.

Engineered a post-apogee water ballast ejection system for a high-altitude competition rocket payload.
Designed and built a personal engineering portfolio site with Hugo, GitHub Pages, and custom recruiter-focused project presentation.
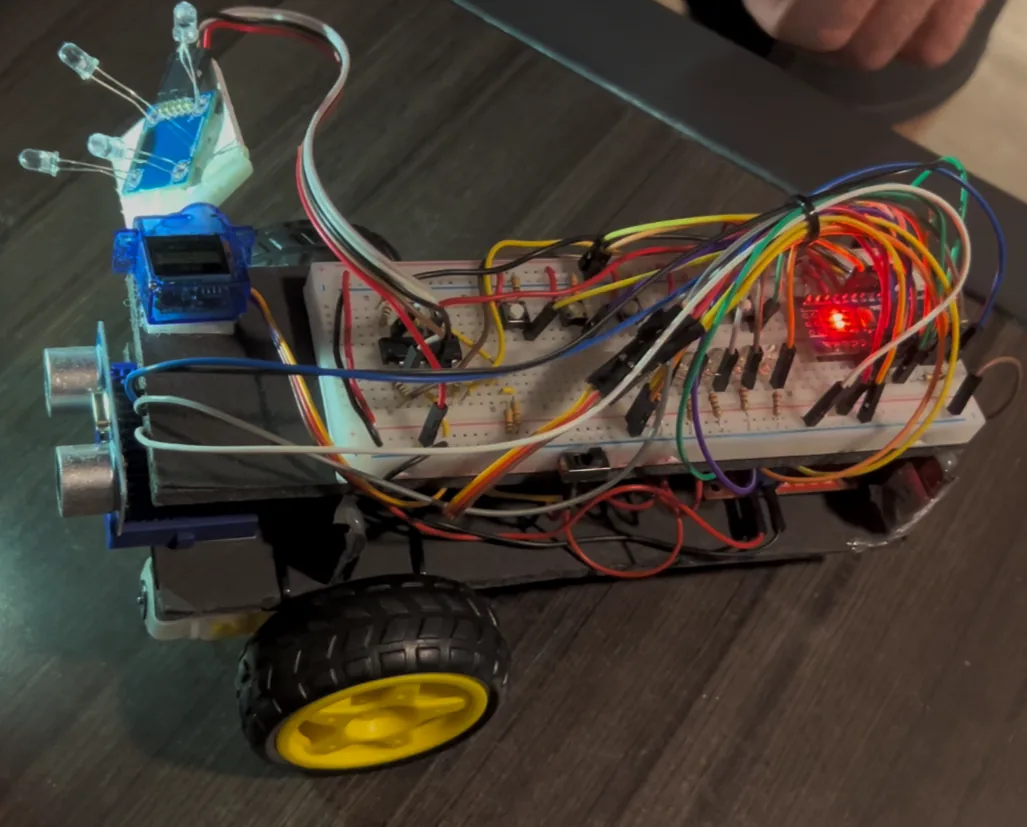
Built a light-following robot in ECEN 301 using Arduino, sensing, control logic, and embedded systems integration.

Built and flew a high-power competition rocket on an L1000 motor as part of a five-person team in BYU's Advanced Launch Competition.

Built a portfolio of CAD models, drawings, renderings, and design studies across mechanical engineering coursework.
Built a Datalog compiler pipeline in C++ including scanning, parsing, relational evaluation, and rule-optimization components.

Built a physical gear-based dynamics model to demonstrate motion transfer and mechanism behavior in a hands-on system.

Applied dynamics and motion analysis to quantify position, velocity, and rotation in recorded backflip footage.

Designed and built a device to measure the static friction coefficient between rope and a carabiner for a climbing-equipment use case.

Designed, launched, and recovered a high-power rocket that earned Tripoli Level 1 certification with an H-class motor.
Contributed payload electronics and flight-camera integration for a student rocket as part of a five-person engineering team.

Applied CFD, vortex-lattice analysis, and optimization methods to improve wing airframe performance.

Used 3D vector geometry and field measurements to estimate the height of the Provo Temple relative to the west gate.
Designed, built, launched, and recovered a student competition rocket powered by a G-class motor to near-target altitude.

Reverse engineered, built, and flew a foamboard RC jet as part of an introductory aircraft design and fabrication project.

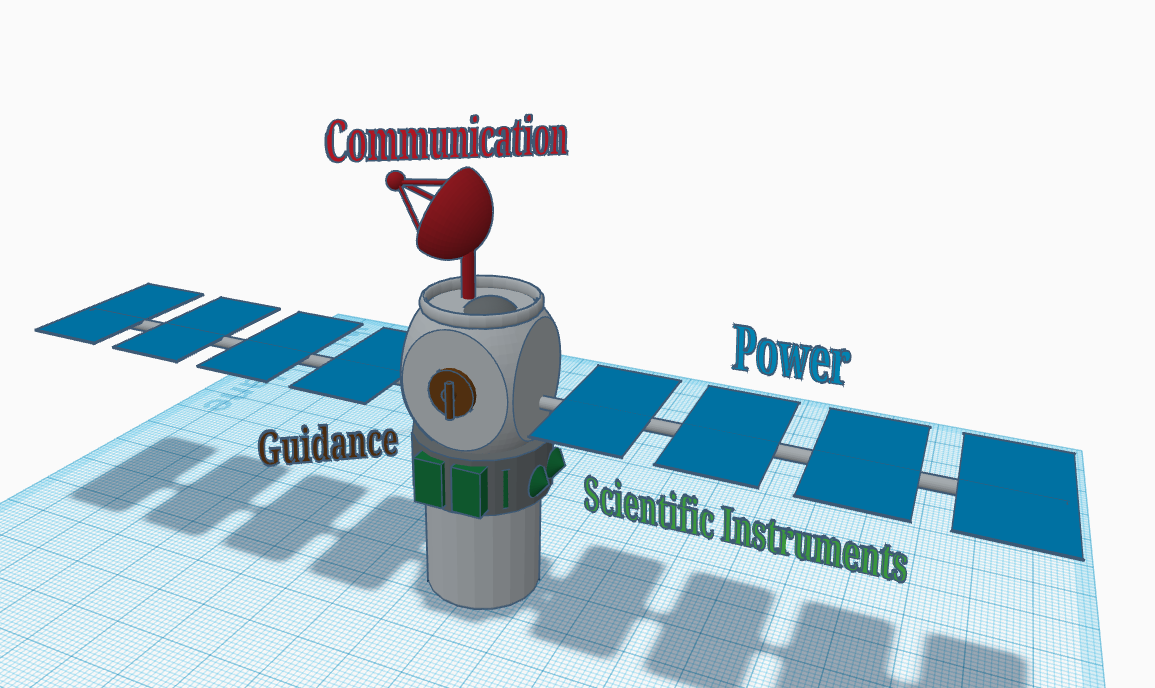
Built a small satellite payload that transmitted flight data from a rocket to the ground as part of a four-person team.
Completed NASA's High School Aerospace Scholars program through multi-month STEM coursework and a team-based virtual engineering experience.

Designed and built a backyard pull-up bar for calisthenics training using simple fabrication and structural planning.

Led an Eagle Scout service project that documented more than 500 gravestones for searchable paper and digital records.