Water Balloon and Droplet Dynamics
Investigated soft-body impact behavior by tracking the motion of a bouncing water balloon and comparing it to a water droplet example. I used high-speed video, frame-by-frame tracking, and a two-state Python model to estimate spring and damping behavior during impact. The project highlights dynamic modeling, experimental data fitting, and interpreting where an idealized model succeeds or breaks down.

Overview
This project began as an attempt to study the impact physics of a bouncing water droplet. After repeated attempts to create a repeatable droplet bounce with the available equipment, the scope shifted to a small water balloon bouncing vertically, which still provided a useful soft-body impact system for modeling.
Although the spring and damping behavior of a water balloon does not perfectly map to a true droplet, the system still provided insight into impact compression, energy loss, and how fluid-filled bodies respond when they strike the ground.
Methods
I used a high-speed camera to record the water balloon bouncing after being released from a height of six inches with zero initial velocity. The balloon position was then logged frame by frame with video-tracking software to build the experimental position history.
To model the system, I created a two-state dynamic model in Python:
- State 1: while the balloon was in free fall, the model included gravity and aerodynamic drag
- State 2: once the balloon contacted the ground, it was modeled as a mass-spring-damper system
I solved the combined system numerically and used trial-and-error fitting on the drag, spring, and damping coefficients until the modeled response aligned as closely as possible with the experimental data.
Each coefficient influenced the motion in a different way:
- Increasing the drag coefficient slowed the balloon during free fall
- Increasing the spring coefficient shortened the impact duration and caused the balloon to rebound faster
- Increasing the damping coefficient reduced the height of each subsequent bounce by dissipating more energy during impact
Results
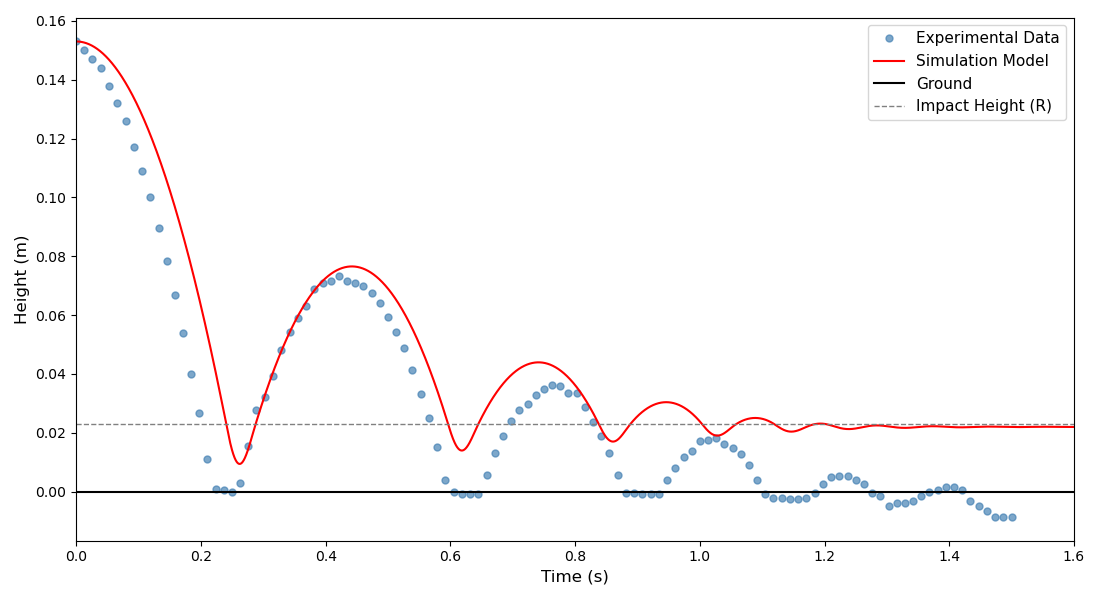
For the water balloon, the best-fit coefficients were:
- Spring coefficient:
k = 250 N/m - Damping coefficient:
c = 0.9 N*s/m
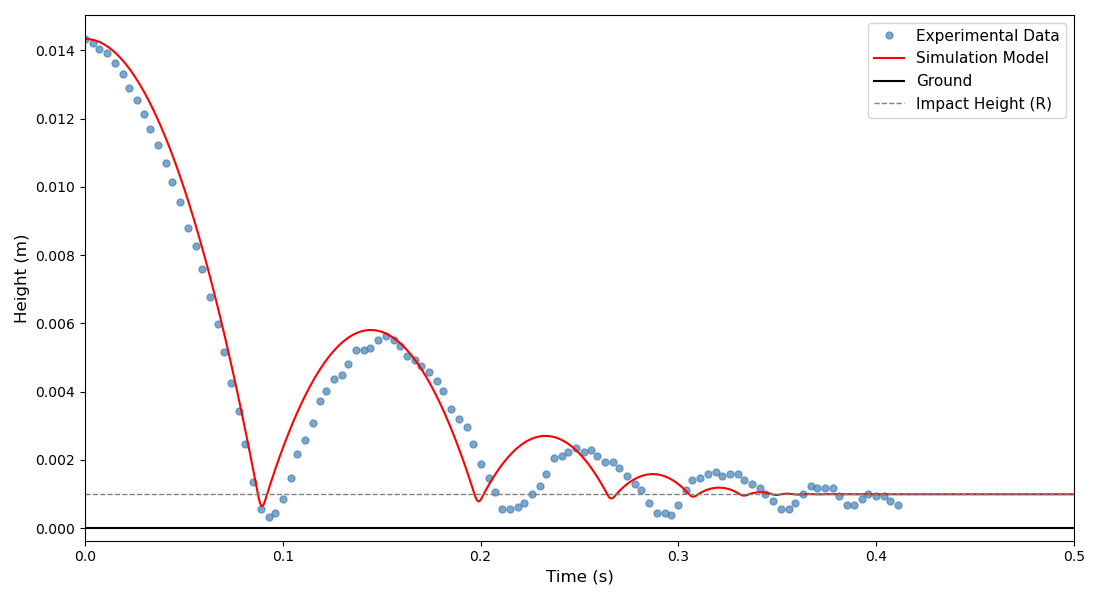
For the water droplet comparison case, the fitted values were:
- Spring coefficient:
k = 2 N/m - Damping coefficient:
c = 0.0009 N*s/m
The model captured the bounce height and time under compression reasonably well, especially for the first few bounces. However, the free-fall timing did not align perfectly with the recorded data, causing the simulation and experiment to drift apart over time.
Reference Videos
Slow Motion Balloon Drop
Slow Motion Bouncing Water Droplet Falling onto Super-Hydrophobic Surface
Discussion
The most important conclusion was that the ground-impact phase could be modeled more successfully than the in-air motion. Adjusting the spring and damping coefficients made it possible to match rebound height and contact duration fairly well. Adjusting the drag coefficient, however, did not produce realistic values while also fixing the free-fall timing.
There are a few likely reasons for the mismatch:
- Time-sampling error: the camera or tracking software may not have captured time intervals exactly as assumed
- Perspective drift: the water balloon moved slightly toward the camera, which made the apparent ground reference shift
- Changing fluid shape: the drag model assumed a constant area, but a balloon or droplet continuously changes shape in flight
This suggests that the mass-spring-damper contact model was a useful approximation, while the free-fall drag model was too simple for a deformable fluid body.