Light Following Robot
Built a light-following robot through a sequence of six embedded systems labs in BYU's ECEN 301 course. The project combined Arduino programming, sensor integration, power management, and control logic to produce a working autonomous robot. It demonstrates practical experience in microcontrollers, electronics, and hardware-software integration.
Overview
I built a light-following robot as part of BYU’s ECEN 301 course. The project progressed through six labs:
- Lab 1: Introduction to Arduino
- Lab 2: State machine for a light-following robot
- Lab 3: Battery pack and battery-voltage indicator
- Lab 4: Capacitive proximity sensor
- Lab 5: Light direction finder
- Lab 6: Final light-following robot
Additional course materials and code are available in the class repository.
Key Takeaways
- Implemented simple state machines on a microcontroller
- Applied analog-to-digital and digital-to-analog conversion concepts in embedded systems
- Interfaced microcontrollers with multiple sensors and actuators, including DC and servo motors
Timeline
- Duration: January 2025 - April 2025
- Total time: 25 hours
- Time commitment: 1-2 hours per week
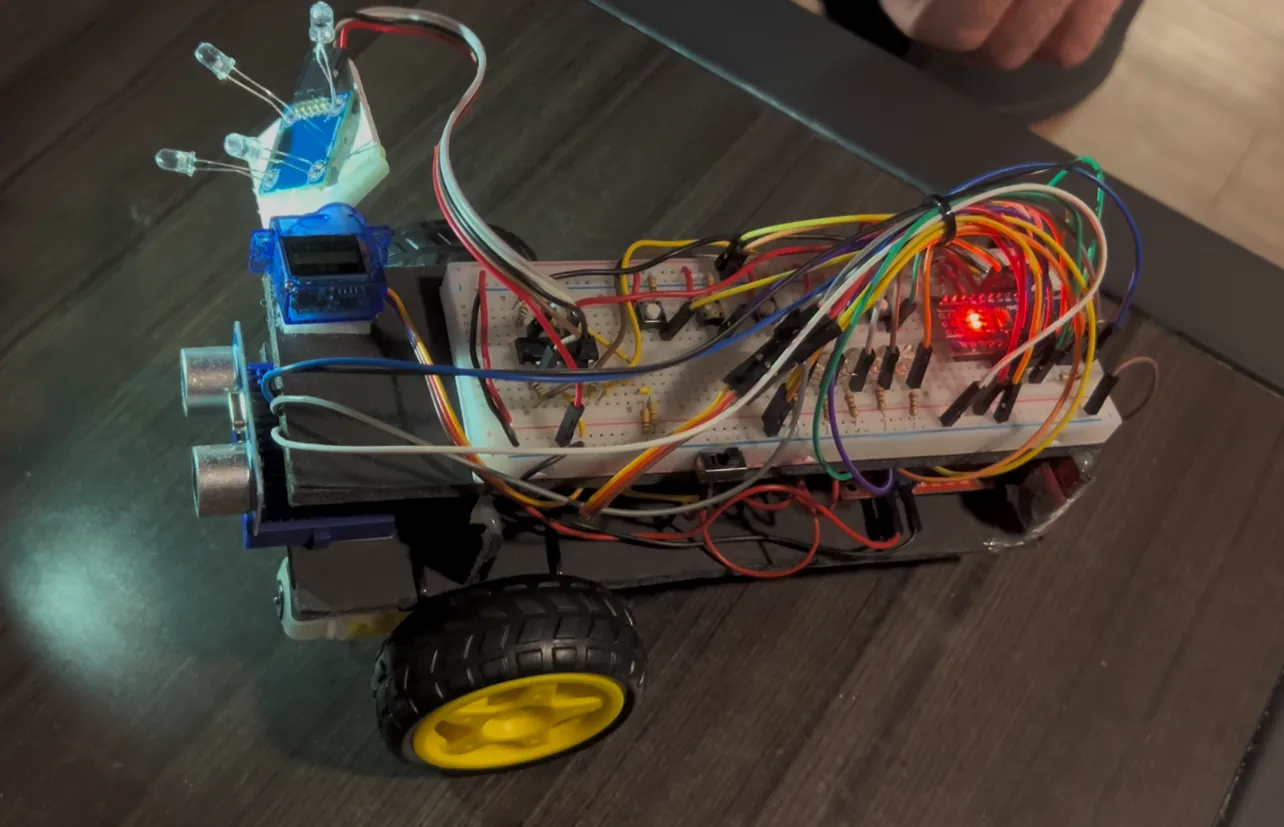
Results
Here is the final video of the working light-following robot:
Final Lab 6 video