Mini Mars Rover
Built a rover-style mechatronic system for a Mars exploration mission in which a four-person team had to autonomously navigate a course and complete task-based objectives. The project combined microcontroller programming, sensors, motor drivers, PWM control, and mechanical prototyping into one integrated system. It highlights embedded systems, electromechanical design, and full-system integration.
Overview
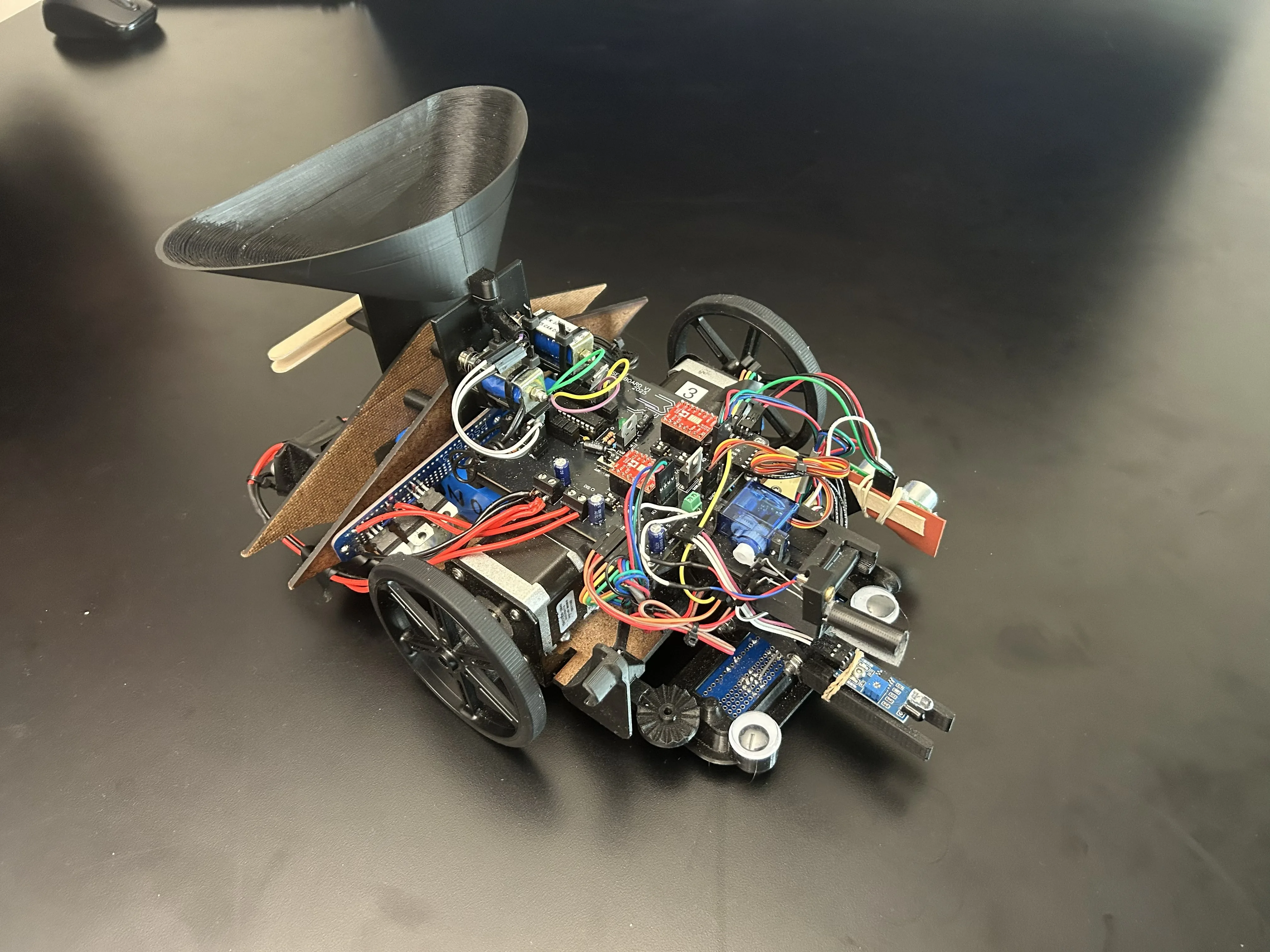
This project was a Mars rover design challenge completed by a four-person team. The goal was to create a robotic rover that could explore a Mars-like environment and complete mission tasks autonomously.
The rover had to exit the lander, follow a pre-specified course, complete key tasks at different locations, and eventually return to the lander to transmit data. The project was designed to bring together the full stack of mechatronics learning outcomes: microcontrollers, sensors, motor control, analog/digital interfacing, communication, and physical prototyping.
Mission Requirements
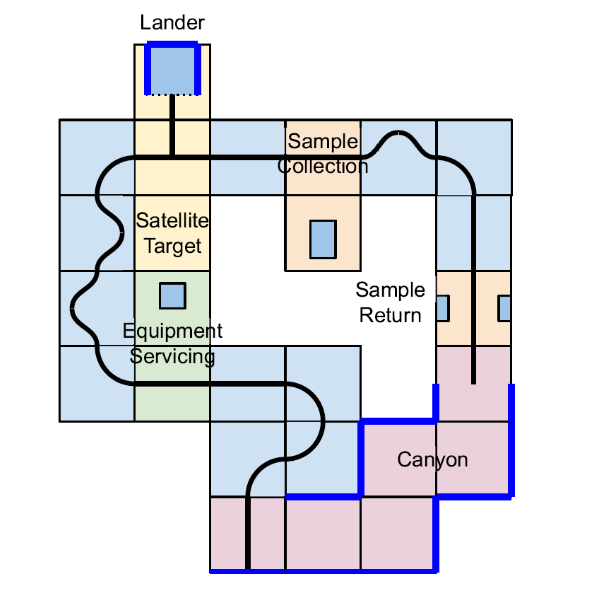
The rover mission included the following major tasks:
- Navigate a 22-tile course by following a 1-inch painted white line on black foam tiles
- Collect and analyze a rock sample
- Navigate a canyon section where the white-line guidance was not available
- Return to the lander
- Transmit data to a satellite target near the end of the course
The lander was always both the start point and end point, and the course layout could be reconfigured while preserving the mission sequence.
Design Focus
This project was built around the same core capabilities emphasized in the course:
- understanding microcontroller architecture, memory, timers, interrupts, and peripherals
- programming embedded systems in a high-level language with event-driven logic
- integrating digital and analog sensors with the microcontroller
- designing motor-driver circuits and using pulse-width modulation for actuator control
- using real prototyping tools such as breadboards, soldering, and mechanical fabrication
- combining electronics and mechanical systems into one complete mechatronic system
Results
Videos
Mechatronics Mini Mars Rover Project
Mechatronics Rover Run