Multi-Agent Quadrotor Hardware and Simulation
Designed and built a crash-resistant quadrotor platform to support multi-agent robotics research in BYU's MAGICC Lab. My work included parametric CAD, ROS 2 and Gazebo simulation, and integration of an AI-agent interface for natural-language control. The project demonstrates strength in robotics systems, mechanical design, prototyping, and software integration.

Overview
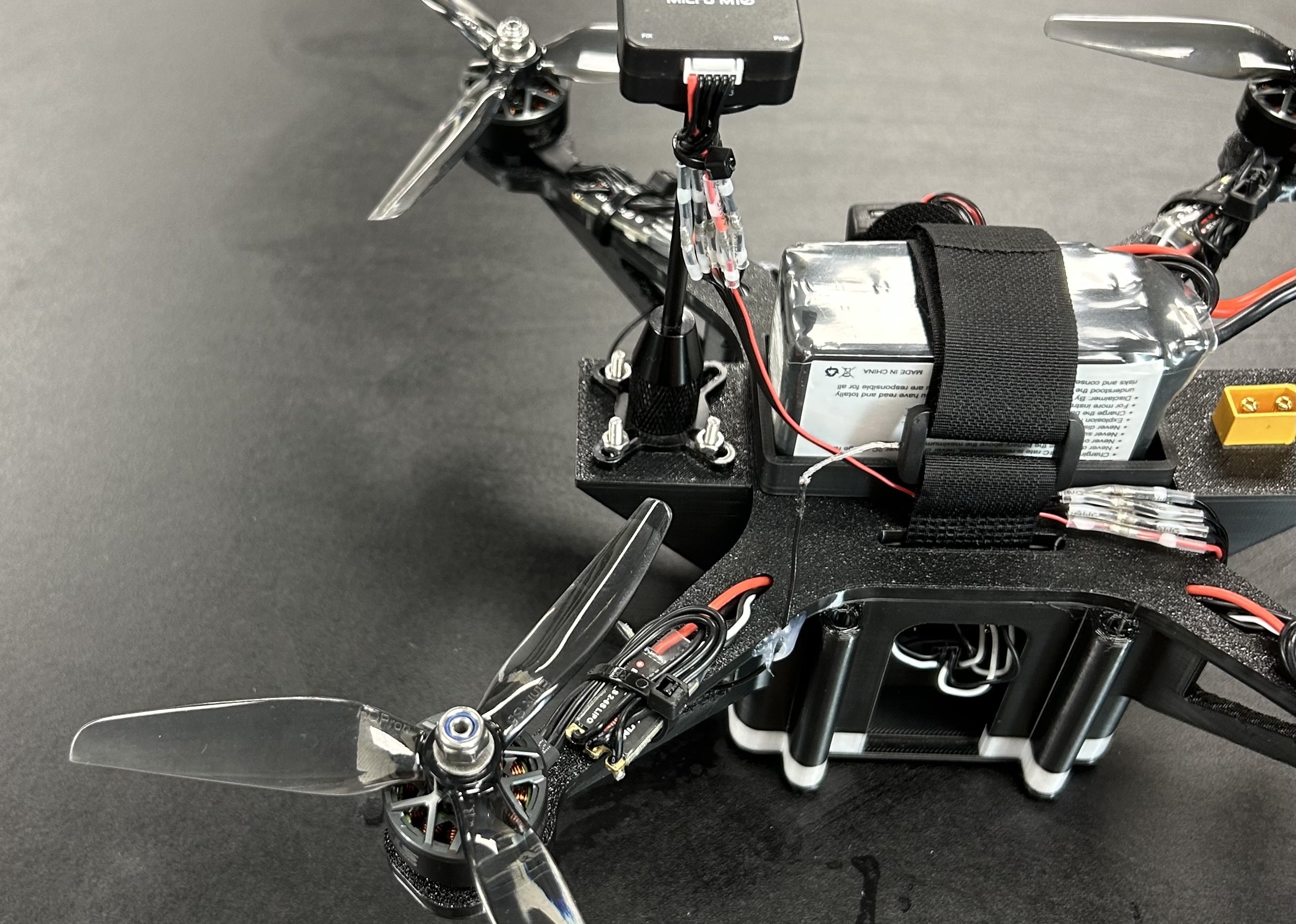
Created a 3D-printed, crash-resistant, LLM-enabled quadrotor with high customizability to provide a platform for multi-agent coordination and AI-agent research within the MAGICC Lab.
Key Contributions
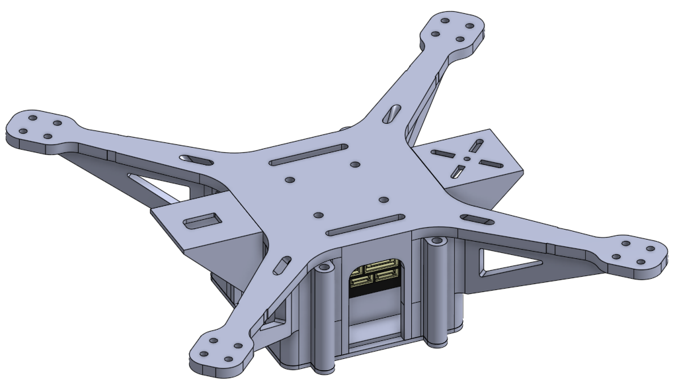
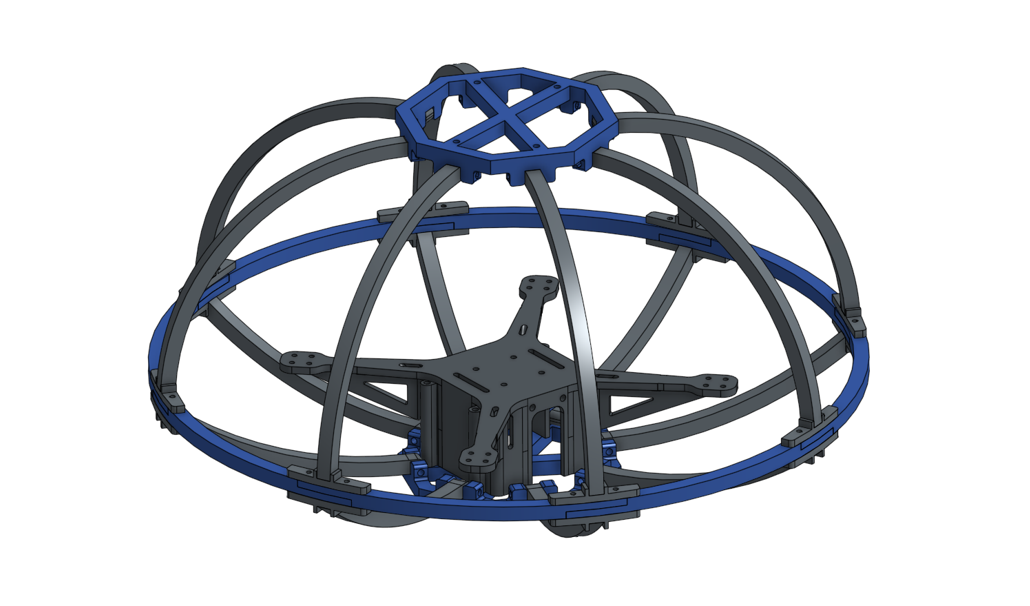
- Designed parametric CAD parts for a 3D-printed quadrotor and spherical protection cage
- Created Gazebo simulations of multiple quadrotors using ROS 2 communication and control
- Integrated an AI agent with ROS 2 for natural-language control of multi-agent simulations
Timeline
- Duration: May 2025 - August 2025
- Total time: Approximately 300 hours
- Time commitment: About 30 hours per week for 12 weeks
Results
Custom Quadrotor

Multi-Agent Coordination
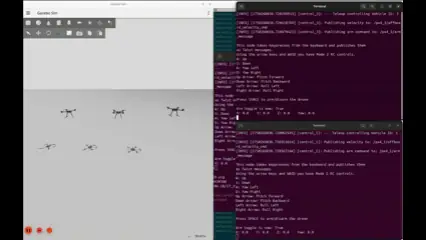
Keyboard input commands

AI Agent Integration
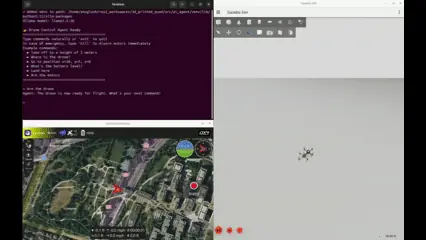
Natural language command processing