
Snowbird BYU High Power Rocket
Helped design, manufacture, integrate, and launch Snowbird, BYU Rocketry's 30,000 ft COTS rocket for IREC 2026.

I'm a Mechanical Engineering student at Brigham Young University with a minor in Computer Science, building at the intersection of hardware and software. My work spans robotics, CAD, simulation, controls, and embedded systems, with a focus on turning technical ideas into well-executed, real-world projects.
Highlights
Helped design, manufacture, integrate, and launch Snowbird, BYU Rocketry's 30,000 ft COTS rocket for IREC 2026.
Designed a 3D-printed quadrotor platform for multi-agent robotics research with ROS 2 simulation and AI-agent control.

Built a portfolio of CAD models, drawings, renderings, and design studies across mechanical engineering coursework.

Built and flew an X650 quadrotor indoors with motion-capture feedback, then validated autonomous trajectories through a ROS 2 / PX4 / Gazebo simulation workflow.
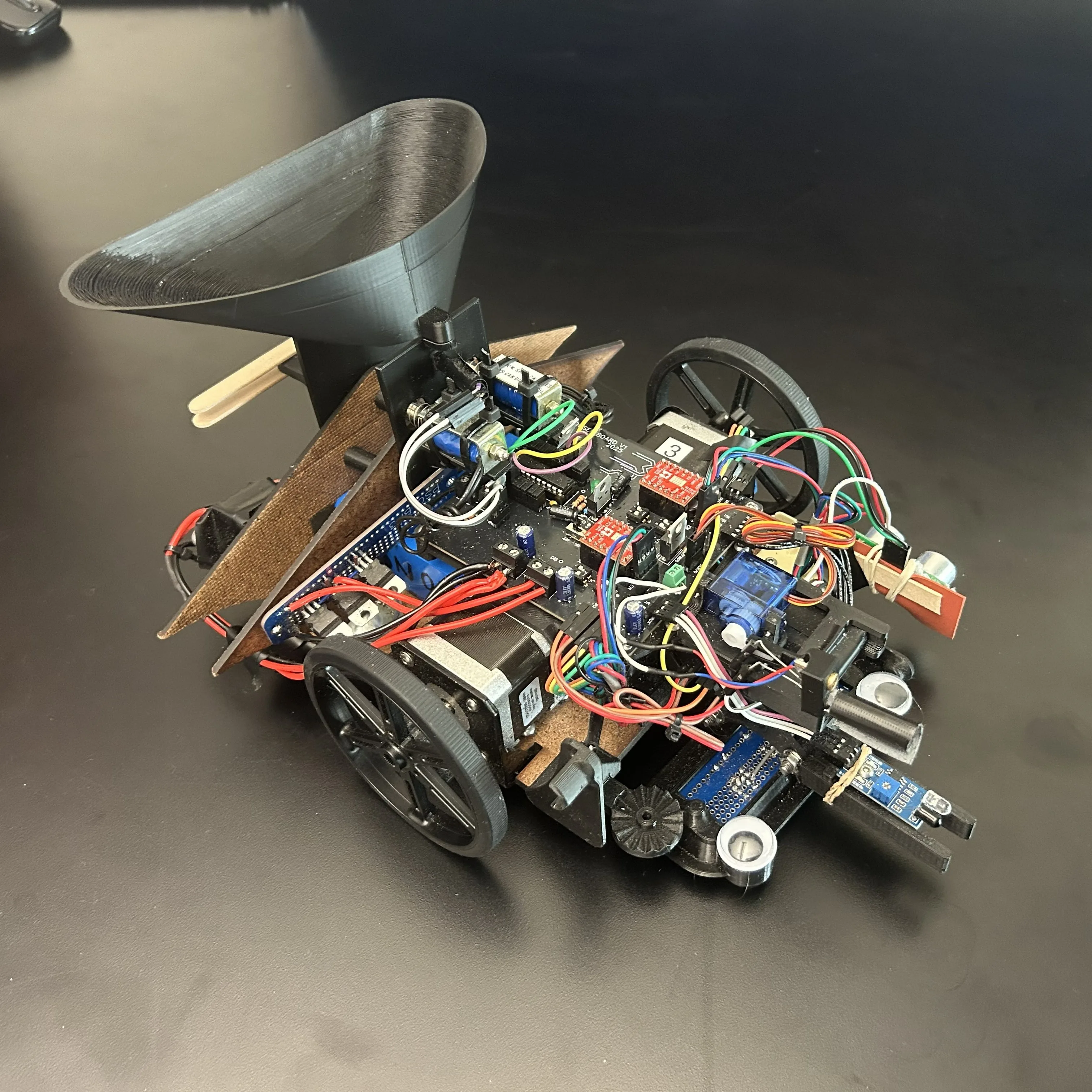
Designed and built a microcontroller-driven Mars rover for a four-person mechatronics mission project with autonomous navigation and task execution.

Engineered a post-apogee water ballast ejection system for a high-altitude competition rocket payload.
B.S. Mechanical Engineering, Minor in Computer Science
ABET-accredited undergraduate training grounded in core engineering analysis, computational methods, and hands-on design. Coursework and projects have emphasized mechanical systems, mechatronics, modeling, and technical problem solving across both physical and software domains.
A project-grounded snapshot of the tools, systems, and technical strengths developed across software, robotics, and engineering design.
| Category | Tools & Specifics | Related Projects & Resources |
|---|---|---|
| Programming & Software | Python, C++, C, Java, Julia, MATLAB, Git/GitHub, Docker, Linux/Ubuntu, HPC systems, SQL | CS 111, CS 236, Solving ODEs, Aerodynamic Analysis, Compiler Project |
| AI Agent Deployment | LangChain, LangGraph, Hugging Face, Ollama | Multi-Agent Quadrotor Hardware and Simulation |
| Robotics & Embedded Systems | ROS 2, Gazebo, PX4 Flight Controllers, PIC Microcontrollers, Arduino, Raspberry Pi, Jetson Nano | Multi-Agent Quadrotor, Light Following Robot, FEMTOSAT |
| Mechanical Design & Fabrication | CAD (Onshape), 3D Printing, Laser Cutting, Carbon Fiber Layup, CNC Manufacturing | CAD Portfolio, Water Ballast, Quadrotor, G Level Rocket, H Level Rocket |
| Electronics & Controls | Circuit Design, Soldering, Sensor Integration, Flight Electronics, Embedded Control | FEMTOSAT, Rocket Payload Electronics, Light Following Robot |
| Engineering Analysis | Optimization, Numerical Methods, Dynamic Modeling, FEA (PrePoMax), Aerodynamic Analysis | Aerodynamic Analysis, Motion Analysis of Backflips, Triangulation, Coefficient of Friction Study |
| Languages & Certifications | Portuguese, Spanish, FAA Part 107, Onshape Associate, Tripoli Level 1 | Missionary Program, CAD Portfolio, H Level Rocket |
I have built experience across engineering, technical project work, research, and hands-on design roles. For the most complete and up-to-date view of my work history, responsibilities, and outcomes, please see my LinkedIn profile.